Introduction
We proposed a guided diffusion based method for Motion Forecasting task. The diffusion process uses the standard UNet architecture with 1D-convolution conditioned on past locations. We addressed the problem of a long-tailed data distribution using a max-norm scaling. Our model outperformed baseline methods in experiments using ArgoVerse 2 dataset.
Members
Andrew Shen, Zhenlin Wang, Yilong Qin
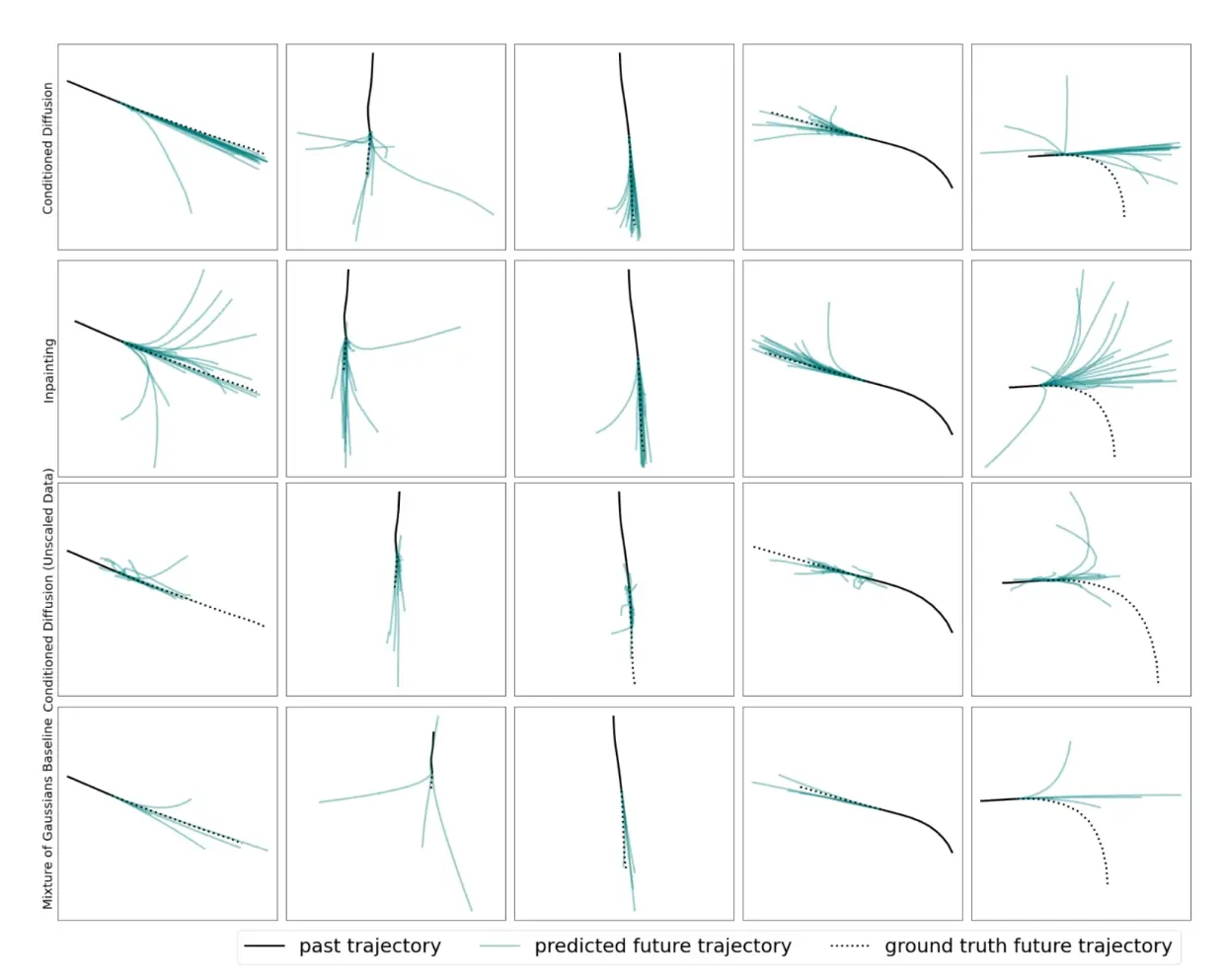
Results Prediction Plots